My Ant-Weight "little nibbler"
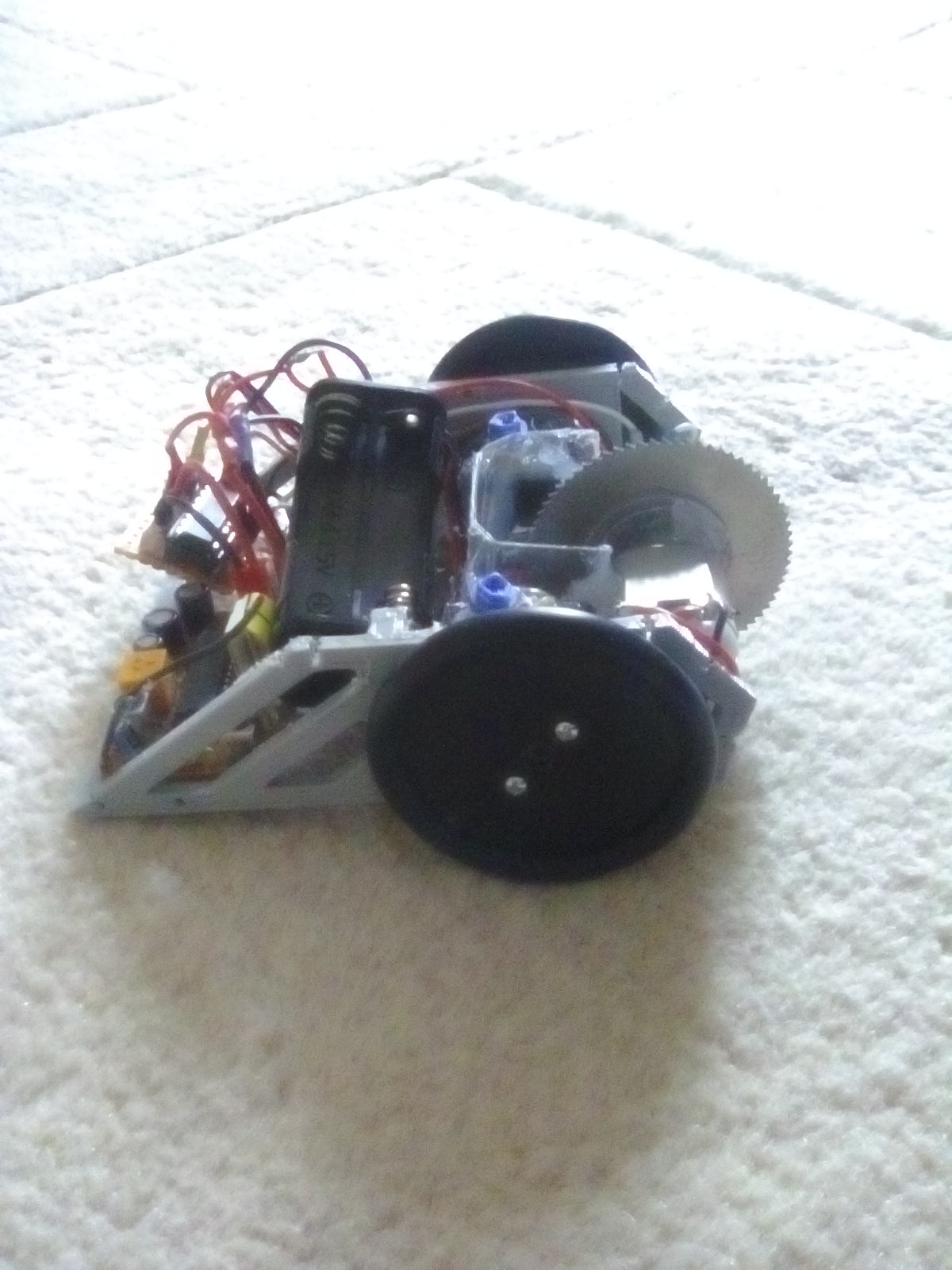

The main chassis is 3d printed with pla, and the armour is aluminium mesh for the top and bottom, and polycarbonate side panels.
The weapon is a spinning disc, which is interchangeable, current discs include a mandrel cutting saw, and a prototype snatch blade.
The wheels are home made from 1.6mm abs, cut using a hole cutter, then wrapped in rubber edging for a tyre, 2mm nuts and bolts secure these to the servos via servo arms.
The overall design uses alot of weight in the chassis and weapon components. This led to reducing the polycarbonate armour
to only the sides and using a much lighter aluminium mesh to provide some protection.
The robot is driven by 2 modified micro servo's, and the weapon by a picaxe chip, which reads the pulses from the receiver,
and also acting as a fail safe for the weapon if a pure signal isn't read.
My Feather-Weight "Radio-Active"
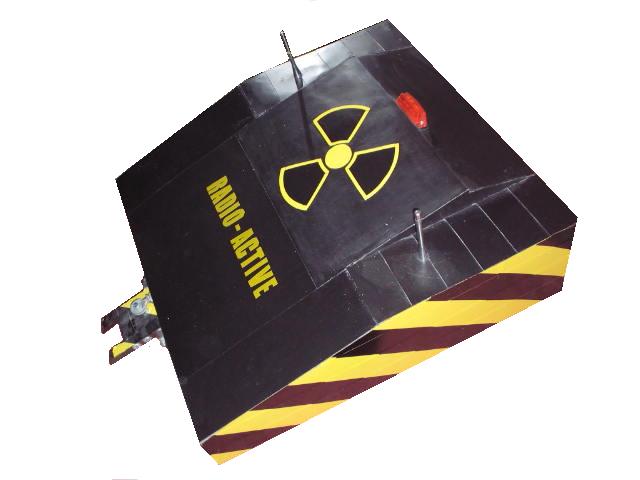
The main chassis is made from 12mm tubular steel, the armour is made from impact resistant ABS plastic,
which is reinforced with fibreglass and aluminium.
The drive is powered by two 14.4v geared motors from cordless power drills,
which directly connect to the wheels drive shaft. The shaft is held on the opposite side via a fabricated
bearing block built onto the frame.
The weapon is an electrically driven lifting fork, powered by a window motor from a ford transit.
This is linked via a steel cable so no impacts are directly transfered to the drive.
The robot is fully controlled via a 2channel radio set, and currently uses a arduino programmed
to read the pulses from the receiver, to decode the controls to include raising and lowering the front forks, whilst
maintaining full tank style driving controls.
The decoded outputs are fed from a homemade shield, and also include a programmed feature to fail safe,
(cutting power to the entire robot), if a pure signal isn't read.
My Feather-Weight "Jackit"


The main chassis is made from 10 & 12mm tubular steel, the armour is made from impact resistant ABS plastic, and aluminium
which is reinforced with fibreglass.
The drive is powered by two 12v windscreen wiper motors, over driven at 24v.
Drive was inially via a custom gear box, but was later replaced with direct drive.
The weapon is a compressed air driven lifter. The air is provided by a high output
air compressor built into the robot, air is dumped out of the ram via an airvalve
operated by a servo to lower the arm.
The lifting capacity is unknown, but following a number of battles it was found the frame
actually bent and twisted under the lifting forces.
The robot is fully controlled via a 3channel radio set, and uses a complicated series of components to measure the
receiver outputs to then drive 40amp relays to activate drive motors and the compressor.
There is also a seperate cicuit which measures the pulses from the battery connection of the receiver, known as ch4
which is a constant string of pulses provided constantly when the radio communication is being received, when these signals stop,
or slow significantly power to the robot is cut.
Check out the Fighting Robots Association at
www.fightingrobots.co.uk
for advice and details before you start your build.
|
Useful Links
|